I am new to using the Raspberry Pi 3 and trying to control brushless gimbal motors with encoders to "look around"
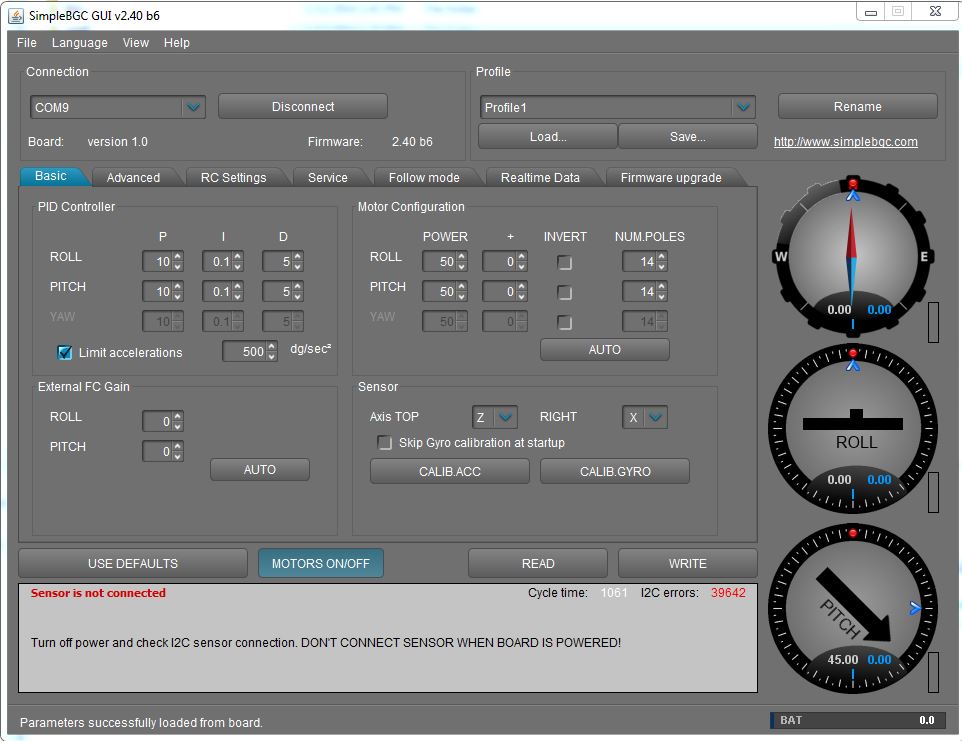
Using I2C, I have gotten them to read its orientation from BaseCam's Simple BGC GUI. (mine includes yaw)
{kind=link}
How do I go about utilizing the data from the GUI to send to the Pi? I want the Pi to constantly output the orientation of the gimbal.