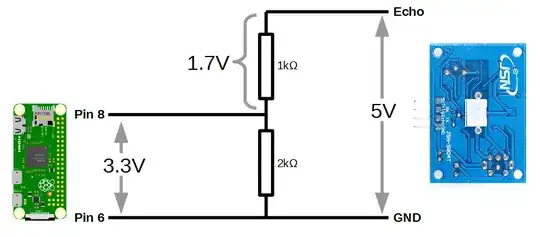
The JSN-SR04T can be used pretty easily with the Raspberry Pi. The only really important thing to remember is that the electronics module is expecting to signal a time corresponding to distance using a 5V pulse. The Pi's GPIO pins are only designed to accept a 3.3V input, so we need to step the voltage down with a voltage divider.
Connection:
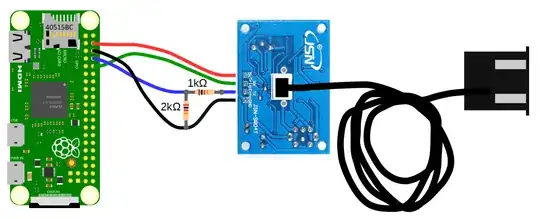
For the sake of keeping the connecting pins together on the Pi’s GPIO block I have preferred to connect as follows;
- Pin 4 connects directly to the +5V connector
- Pin 6 Connects directly to the GND connector, but is incorporated into the voltage divider for the Echo pin.
- Pin 8 (GPIO 14 TXD) connects to the centre of the voltage divider
- Pin 10 (GPIO 15 RXD) connects directly to the Trig connector.
The following python script will get you started. save it as something (e.g. distance.py) and then run it by typing python distance.py at the command line.
#!/usr/bin/python
#encoding:utf-8
import RPi.GPIO as GPIO #Import GPIO library
import time #Import time library
GPIO.setmode(GPIO.BCM) #Set GPIO pin numbering
TRIG = 15 #Associate pin 15 to TRIG
ECHO = 14 #Associate pin 14 to Echo
print "Distance measurement in progress"
GPIO.setup(TRIG,GPIO.OUT) #Set pin as GPIO out
GPIO.setup(ECHO,GPIO.IN) #Set pin as GPIO in
while True:
GPIO.output(TRIG, False) #Set TRIG as LOW
print "Waiting For Sensor To Settle"
time.sleep(2) #Delay of 2 seconds
GPIO.output(TRIG, True) #Set TRIG as HIGH
time.sleep(0.00001) #Delay of 0.00001 seconds
GPIO.output(TRIG, False) #Set TRIG as LOW
while GPIO.input(ECHO)==0: #Check if Echo is LOW
pulse_start = time.time() #Time of the last LOW pulse
while GPIO.input(ECHO)==1: #Check whether Echo is HIGH
pulse_end = time.time() #Time of the last HIGH pulse
pulse_duration = pulse_end - pulse_start #pulse duration to a variable
distance = pulse_duration * 17150 #Calculate distance
distance = round(distance, 2) #Round to two decimal points
if distance > 20 and distance < 400: #Is distance within range
print "Distance:",distance - 0.5,"cm" #Distance with calibration
else:
print "Out Of Range" #display out of range
When executed the sensor will settle and then start displaying the distance every two seconds.
Waitng For Sensor To Settle
Distance: 53.44 cm
Waitng For Sensor To Settle
Distance: 52.95 cm
There is more information on operation, connection and code here.


