I recently bought one of these stepper motor and driver boards - and I cannot find any documentation how to connect it to the Raspberry Pi - I'm attempting to use the AdaFruit tutorial and while I've gotten all of the connections made to the proper gpio pins connected (the leds on the driver board light up properly, the motor does nothing).
Does anyone know where I might look for more information on how to connect the raspberry pi to a stepper motor?
Update: Nov 15th 2013 My Program code is this
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
#enable_pin = 18
coil_A_1_pin = 4
coil_A_2_pin = 17
coil_B_1_pin = 23
coil_B_2_pin = 24
#GPIO.setup(enable_pin, GPIO.OUT)
GPIO.setup(coil_A_1_pin, GPIO.OUT)
GPIO.setup(coil_A_2_pin, GPIO.OUT)
GPIO.setup(coil_B_1_pin, GPIO.OUT)
GPIO.setup(coil_B_2_pin, GPIO.OUT)
#GPIO.output(enable_pin, 1)
def forward(delay, steps):
for i in range(0, steps):
setStep(1, 0, 1, 0)
setStep(0, 1, 1, 0)
setStep(0, 1, 0, 1)
setStep(1, 0, 0, 1)
def backwards(delay, steps):
for i in range(0, steps):
setStep(1, 0, 0, 1)
setStep(0, 1, 0, 1)
setStep(0, 1, 1, 0)
setStep(1, 0, 1, 0)
def setStep(w1, w2, w3, w4):
GPIO.output(coil_A_1_pin, w1)
GPIO.output(coil_A_2_pin, w2)
GPIO.output(coil_B_1_pin, w3)
GPIO.output(coil_B_2_pin, w4)
while True:
delay = raw_input("Delay between steps (milliseconds)?")
steps = raw_input("How many steps forward? ")
forward(int(delay) / 1000.0, int(steps))
steps = raw_input("How many steps backwards? ")
backwards(int(delay) / 1000.0, int(steps))
My breadboard looks like this 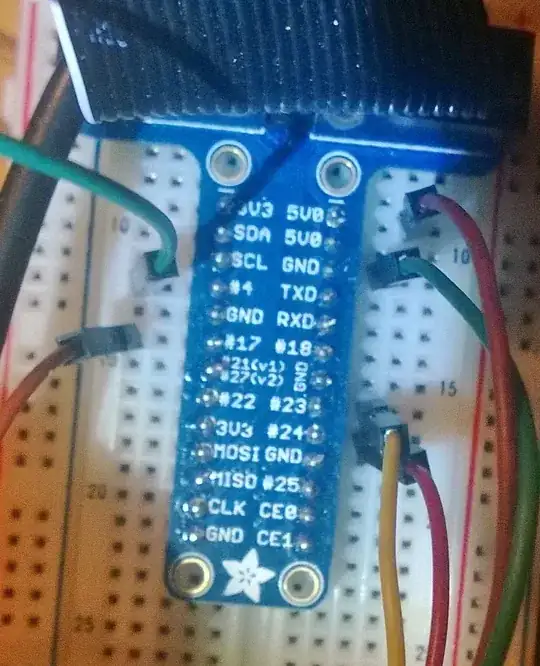
My driver board looks like this
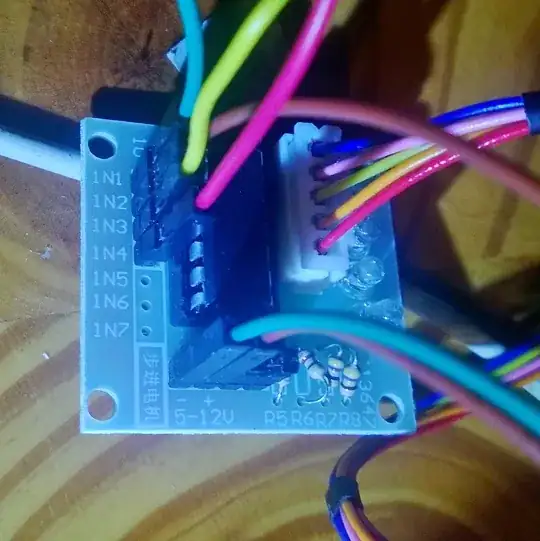
I have
IN1 => GPIO 4
IN2 => GPIO 17
IN3 => GPIO 23
IN4 => GPIO 24