I am building a robot for a school project. I use an Arduino Uno, 2 dc motor's and an Ultra Sonic range measurement module. I want the robot to be autonomous, he has to be able to move around on his own using the Ultra Sonic sensor. Important to mention is that I don't use a MotorShield to control my dc motors. This is my latest version of coding:
#include <Servo.h> //include Servo library
#include <AFMotor.h> //include DC motor Library
#define trigPin 12// define the pins of your sensor
#define echoPin 13
AF_DCMotor motor2(7); // set up motors.
AF_DCMotor motor1(6);
void setup() {
Serial.begin(9600); // begin serial communitication
Serial.println("Motor test!");
pinMode(trigPin, OUTPUT);// set the trig pin to output (Send sound waves)
pinMode(echoPin, INPUT);// set the echo pin to input (recieve sound waves)
motor1.setSpeed(105); //set the speed of the motors, between 0-255
motor2.setSpeed (105);
}
void loop() {
long duration, distance; // start the scan
digitalWrite(trigPin, LOW);
delayMicroseconds(2); // delays are required for a succesful sensor operation.
digitalWrite(trigPin, HIGH);
delayMicroseconds(10); //this delay is required as well!
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration/2) / 29.1;// convert the distance to centimeters.
if (distance < 25)/*if there's an obstacle 25 centimers, ahead, do the following: */ {
Serial.println ("Close Obstacle detected!" );
Serial.println ("Obstacle Details:");
Serial.print ("Distance From Robot is " );
Serial.print ( distance);
Serial.print ( " CM!");// print out the distance in centimeters.
Serial.println (" The obstacle is declared a threat due to close distance. ");
Serial.println (" Turning !");
motor1.run(FORWARD); // Turn as long as there's an obstacle ahead.
motor2.run (BACKWARD);
}
else {
Serial.println ("No obstacle detected. going forward");
delay (15);
motor1.run(FORWARD); //if there's no obstacle ahead, Go Forward!
motor2.run(FORWARD);
}
}
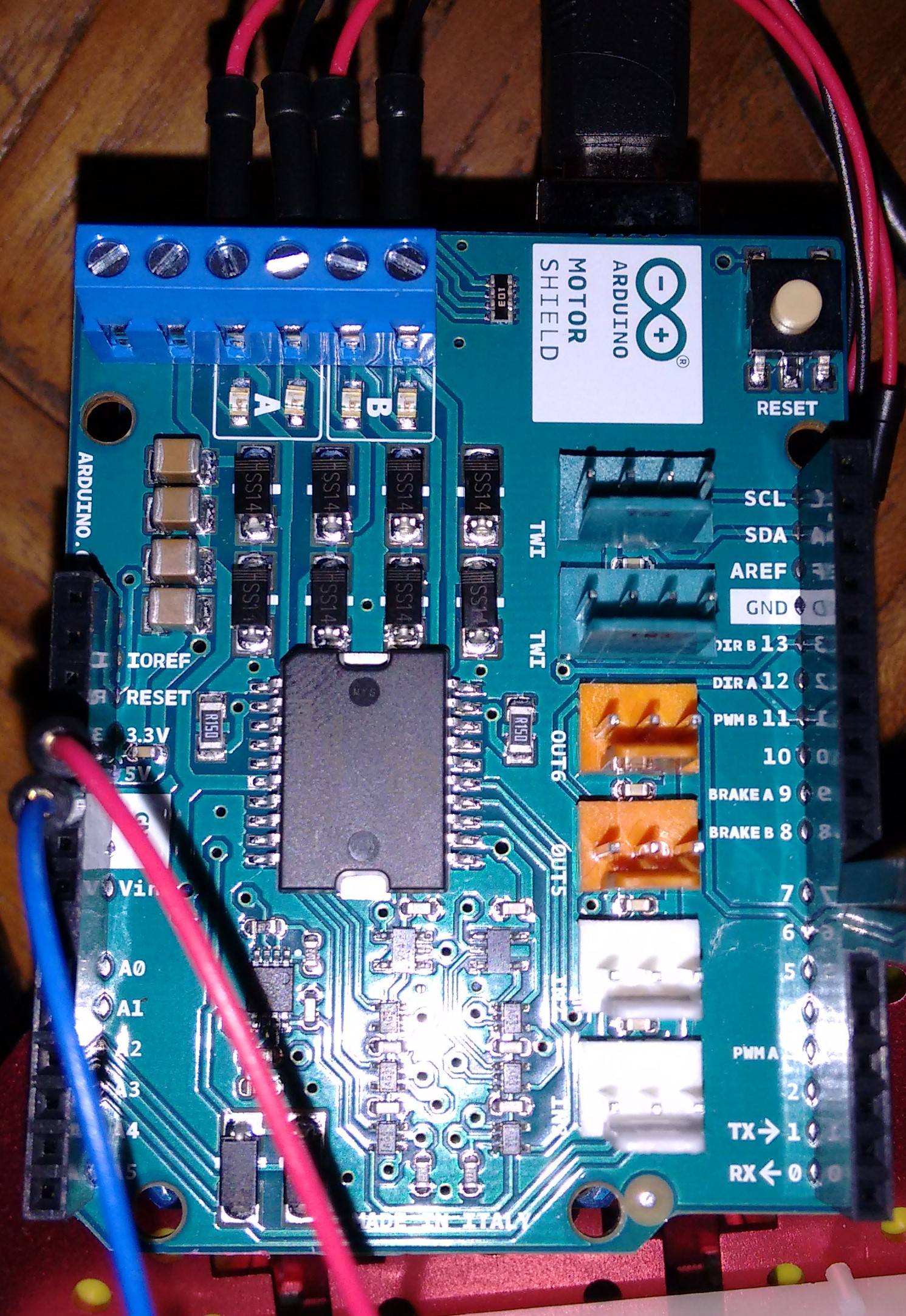 Now I added an ARDUINO MOTOR SHIELD REV3 to control my dc motors. Now the wheels are actually spinning, but after a few turns they stop. I think it is software related, but I am not 100% sure. Also I think I am connecting my motors correct to my motorshield, but don't adress them properly in my code.
And I don't have any clue how to solve this problem.
Can anybody help me with this?
Now I added an ARDUINO MOTOR SHIELD REV3 to control my dc motors. Now the wheels are actually spinning, but after a few turns they stop. I think it is software related, but I am not 100% sure. Also I think I am connecting my motors correct to my motorshield, but don't adress them properly in my code.
And I don't have any clue how to solve this problem.
Can anybody help me with this?